


Objetivos y oportunidad del proyecto
La industria y legisladores están aceptando el hecho de que la
implantación de la conducción automatizada se logrará a través
de la definición y aprendizaje de miles de casos de uso muy
bien definidos. Además, existe una gran cantidad de
tecnologías subyacentes y complementarias que son esenciales
para hacer realidad y comercialmente viable la conducción
autónoma.
La teleoperación es necesaria como respaldo para los vehículos
sin conductor y se espera que sea parte de la regulación
inicial en conducción automatizada en la mayoría de los
países.
La regulación de la teleoperación está surgiendo como un paso
necesario para el posible despliegue de niveles SAE de
autonomía L4 y L5. Se necesita ayuda de la teleoperación para
resolver situaciones de conducción desconocidas: los llamados
casos extremos para vehículos autónomos, en particular en
entornos tan heterogéneos como los hub logísticos, los
entornos industriales y portuarios y los servicios de última
milla.
A través de este aprendizaje se mejorarán las capacidades de
decisión convirtiendo eventos críticos en situaciones
conocidas, y de manera paralela, permitirá el desarrollo de
mecanismos de seguridad para implementar controles vehiculares
confiables y tolerantes a fallos, incluso en los casos límite.
El objetivo de
FLEETBOT
es definir y desarrollar una serie de funcionalidades y
demostradores orientados a resolver la implementación de la
automatización en logística de última milla a través de
monitorización remota, la optimización de la movilidad y la
logística dentro del contexto de la CAPV.
FLEETBOT
es un proyecto de investigación ambicioso para los
ejercicios 2022-2023 con un consorcio que reúne centros
tecnológicos relevantes, así como una universidad y una
unidad de I+D empresarial referentes en movilidad, logística
e industria. El consorcio está compuesto por:
TECNALIA (líder), CEIT, Universidad de Deusto y Ametzagaiña
(Unidad de I+D empresarial).
Se trata de un grupo de trabajo que pretende convertirse en
grupo de investigación de referencia
en gestión de logística y de flotas mixtas mediante
monitorización remota tanto a nivel de la CAPV como a nivel
estatal y europeo.
Objetivos principales
El proyecto
FLEETBOT
tiene dos Objetivos principales:
Generar conocimiento y desarrollar soluciones tecnológicas
avanzadas para la integración y operación óptima de
sistemas basados en monitorización remota para
aplicaciones de movilidad semi autónoma y uso logístico e
industrial.
Favorecer la colaboración y garantizar la competitividad y
excelencia de los agentes de la Red Vasca de
Investigación, en torno a la gestión de flotas mixtas de
sistemas tele-operados en aplicaciones de movilidad e
industria, adecuadas a las necesidades del tejido
industrial vasco y que puedan ser fácilmente transferidas
y desplegadas.
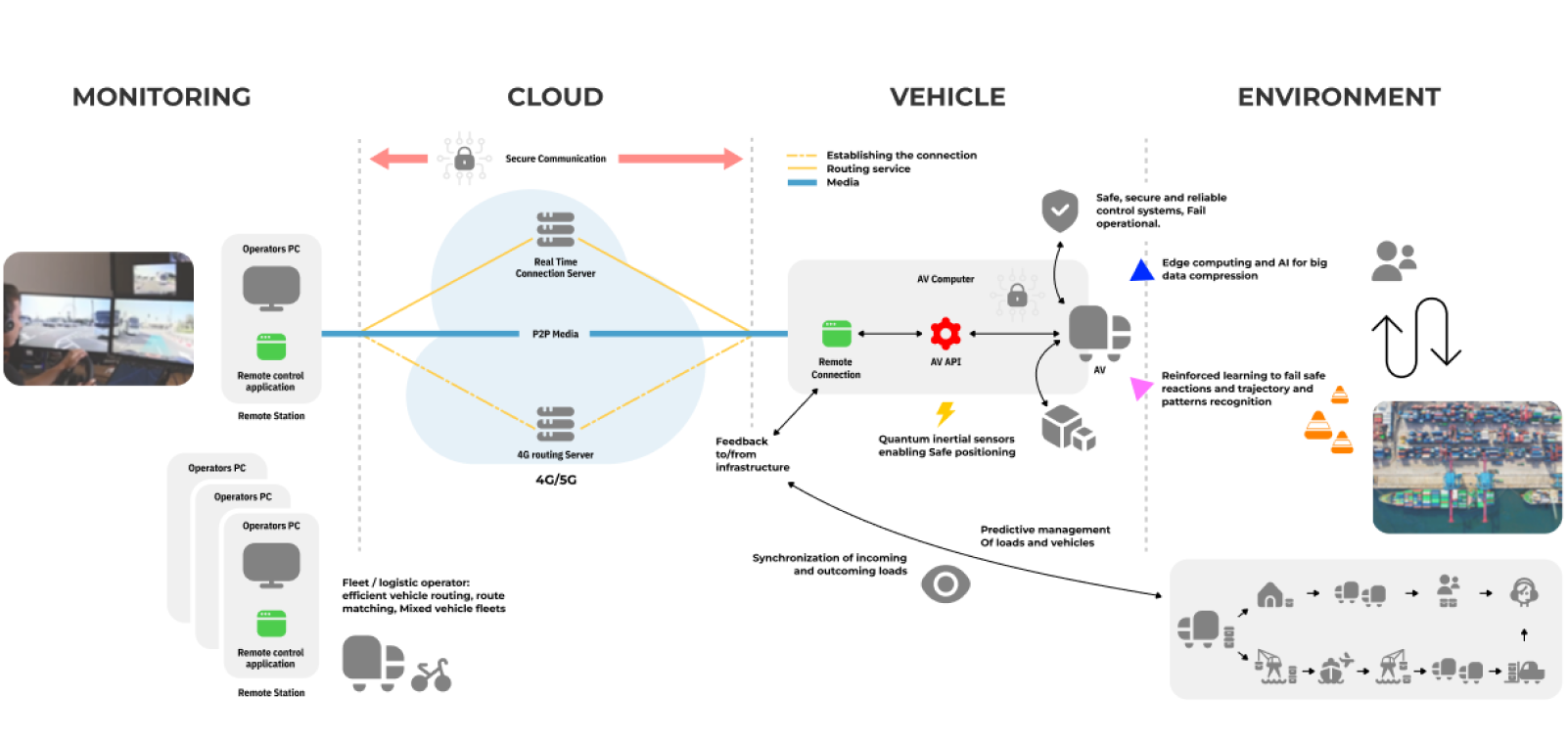
Objetivos tecnológicos
Optimización de flotas mixtas y heterogéneas (vehículos
autónomos y semi autónomos): gestión flotas y rutas.
Movimientos de vehículos (semi-) autónomos para la
movilidad y logística: optimización de trayectorias y
aprendizaje (AI) y mejora del posicionamiento por
sensórica inercial cuántica y sistemas de percepción de la
infraestructura.
Optimización del uso de redes y gestión y estandarización
de datos.
Monitorización remota y tele-operación segura.
Seguridad funcional & ciberseguridad: vehicular y
hacia/desde la infraestructura.
Big data handling: Aprendizaje de patrones de datos como
habilitador para conducción puramente autónoma.
Generar soluciones innovadoras de gestión inteligente de
vehículos semi autónomos que optimicen su explotación
durante toda su vida útil.
Abordar el desarrollo de herramientas que faciliten el
despliegue de la tele operación en entornos de movilidad
de última milla.
Lograr capacitación para extrapolar las metodología y
herramientas desarrolladas para los casos de estudio del
proyecto a nuevas configuraciones de vehículos y otros
procesos industriales.
Objetivos del país
Contribuir a que las empresas vascas industriales del
sector de movilidad e industria puedan disponer de
productos, herramientas y metodologías para impulsar la
transición de forma competitiva al uso de conducción semi
autónoma.
Generar tecnología que permita desarrollar soluciones
competitivas de movilidad basada en conducción semi
autónoma.
Desarrollar soluciones tecnológicas innovadoras que
permitan que la transición a la conducción completamente
automatizada sea una alternativa viable a entornos
logísticos, industriales y a la operación en logística de
última milla.
Contribuir a posicionar a Euskadi en el despliegue de
soluciones tele operadas en movilidad e industria.
Fomentar la colaboración entre las entidades que conforman
el consorcio, aprovechar sinergias y complementariedades
para impulsar la generación de conocimiento en aras a
crear una ciencia de excelencia que permita reforzar la
posición de Euskadi en el ámbito de la movilidad en el
panorama científico internacional.
Fomentar la colaboración con el consorcio de la
propuesta QFIRST que se está elaborando para el mismo
Programa Elkartek 2022 y que está siendo liderado por el
BRTA. La propuesta QFIRST, se centra en la prospección
de tecnología cuántica, entre otras líneas, para el
estudio del desarrollo de sensores cuánticos inerciales
y por ende complementa perfectamente la propuesta
tecnológica de
FLEETBOT.
Fomentar la integración de tecnologías exploradas en otros
ELKARTEKS como ARTVROS y Autoev@l para demostrar su
integración en un caso de uso de logística.